SE(3) 跟踪与 HQP 实际响应
快速开始¶
1. 准备环境变量¶
复制环境变量模板,并按实际网络环境修改 .env 中的关键变量(例如 FRANKA_ROBOT_IP、ROS_MASTER_URI 等)。通常第一次配置后无需再变动。
cp .env.example .env
2. 启动并进入实验容器¶
所有依赖与编译工具链均已内置于配置好的 Docker 镜像中。执行以下命令拉起并进入容器:
docker compose up --build -d
docker exec -it ros1-franka bash
3. 编译工作区¶
在容器终端中依次执行,完成 ROS1 工作区的编译与刷新:
source /opt/ros/noetic/setup.bash
cd /workspace
catkin_make
source /workspace/devel/setup.bash
4. 关节空间初始化(推荐)¶
在启动闭环实验前,建议先将机械臂归位至标准构型,避免后续笛卡尔空间实验在奇异姿态附近起步。
需先在一个终端中拉起手动实验后端:
roslaunch on_orbit_bringup manual_experiment.launch
在另一个终端中,通过 joint_posture_demo.py 发送关节目标。支持直接传入关节角或使用 YAML 文件:
rosrun on_orbit_apps joint_posture_demo.py \
_joint_position:=[0.0,-0.785,0.0,-2.356,0.0,1.571,0.785]
rosrun on_orbit_apps joint_posture_demo.py \
_joint_position_file:=/workspace/src/on_orbit_apps/config/home_posture.yaml
归位完成后,该脚本会自动将控制器切回原先的 imp 或 hqp,随后可关闭手动实验后端,开始正式闭环。
5. 启动闭环仿真实验¶
下发指令将自动启动 ROS Master、底层控制器以及规划器(SE3, Decoupled 等)。
运行期间会进行多套架构的自动序列切换,并使用 rosbag 进行全景数据抓取,保存至 /workspace/closed/ 目录下。

roslaunch on_orbit_bringup closed_loop_experiment.launch
⚙️ 核心设定:闭环轨迹与约束在哪修改?
closed_loop_experiment.launch 会根据内部状态机的执行阶段,自动加载 src/on_orbit_apps/config/ 目录下的特征参数文件(如 closed_loop_planner_demo_se3.yaml)。
这些 YAML 文件定义了:
- waypoints:自动化闭环追踪的多航点数组信息。
- 物理约束:如 v_max、a_max、动作保持判断等控制界限。
如需修改闭环过程中的目标点位或运动快慢,直接修改对应的 YAML 即可,无需重写底层应用。
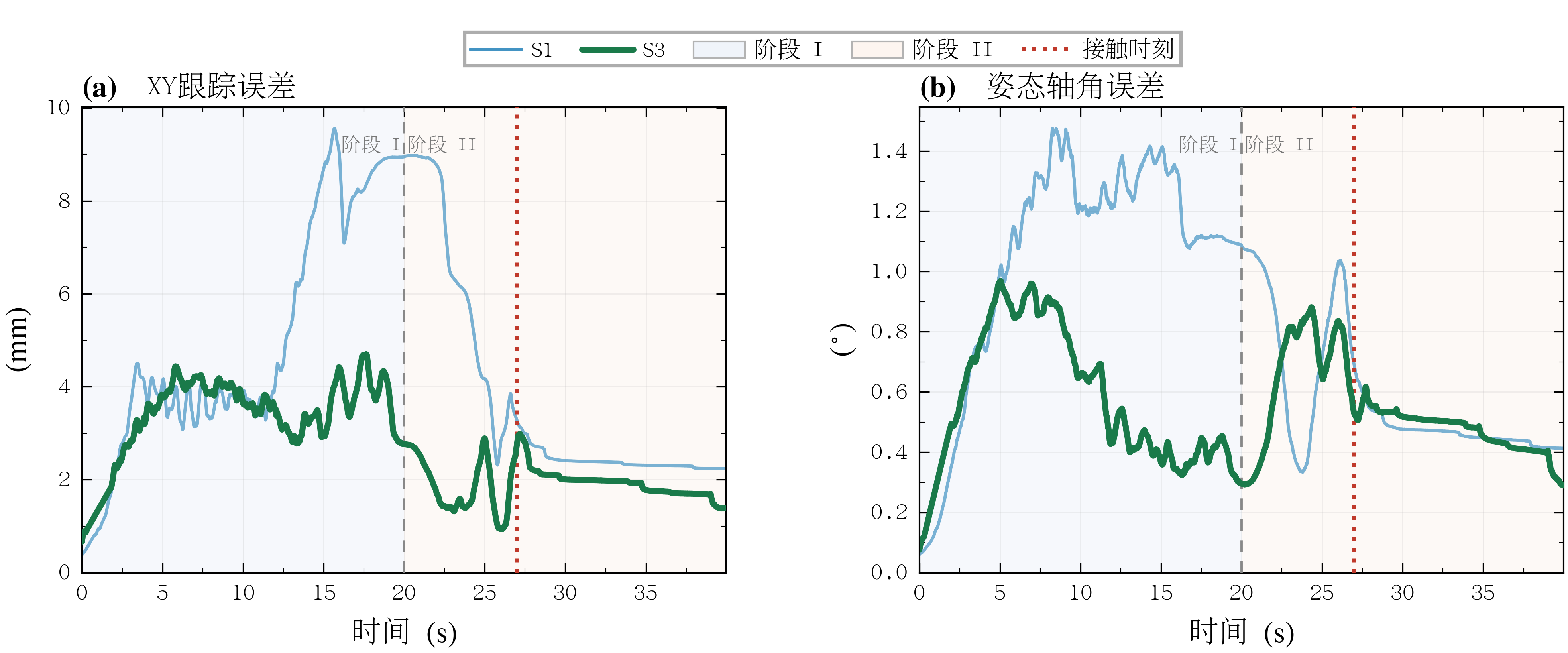
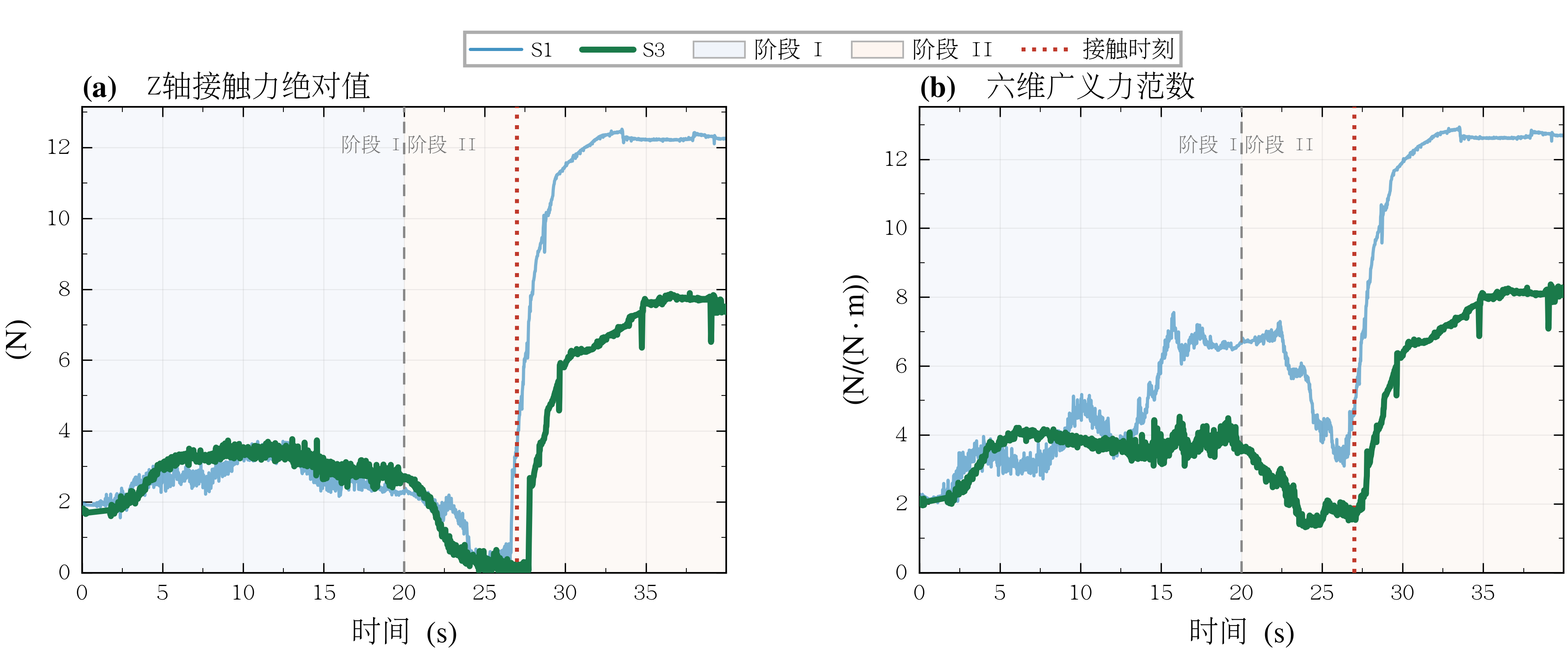
6. 科研结果绘图与指标计算¶
闭环实验结束后,执行数据处理与分析脚本。算法将自动对齐各策略维度数据,最终输出高清晰度对比图(PNG 与纯矢量 PDF 格式)至 /workspace/closed/publication/。
python3 /workspace/src/on_orbit_apps/scripts/plot_experiment_publication.py
执行产出包含跟踪误差与广义力响应等重要指标比对图幅:
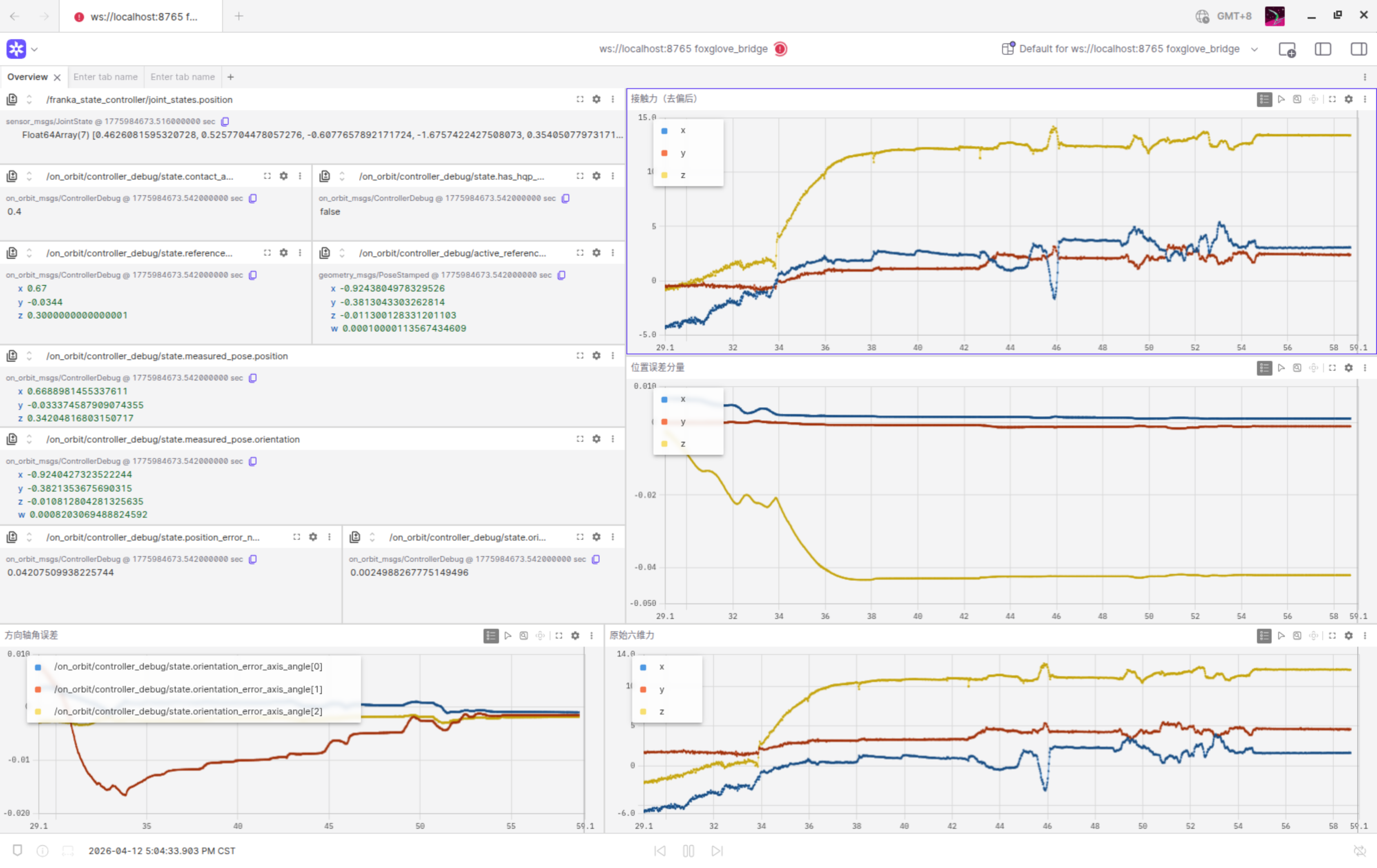
7. 进阶使用:Foxglove 调试面板¶
启动常规实验时,可通过附加 start_foxglove_bridge:=true 标志开启系统透传端口:
roslaunch on_orbit_bringup manual_experiment.launch \
launch_visualization:=true \
start_foxglove_bridge:=true
启动完成并在桌面端运行 Foxglove,连接至 ws://localhost:8765 即可获得涵盖 ModeState 与 3D 轨迹预演在内的全套运行时面板: